[Fire Fighting Robot: Video - 10 ft Distance, Finding & Putting Out the Candle]
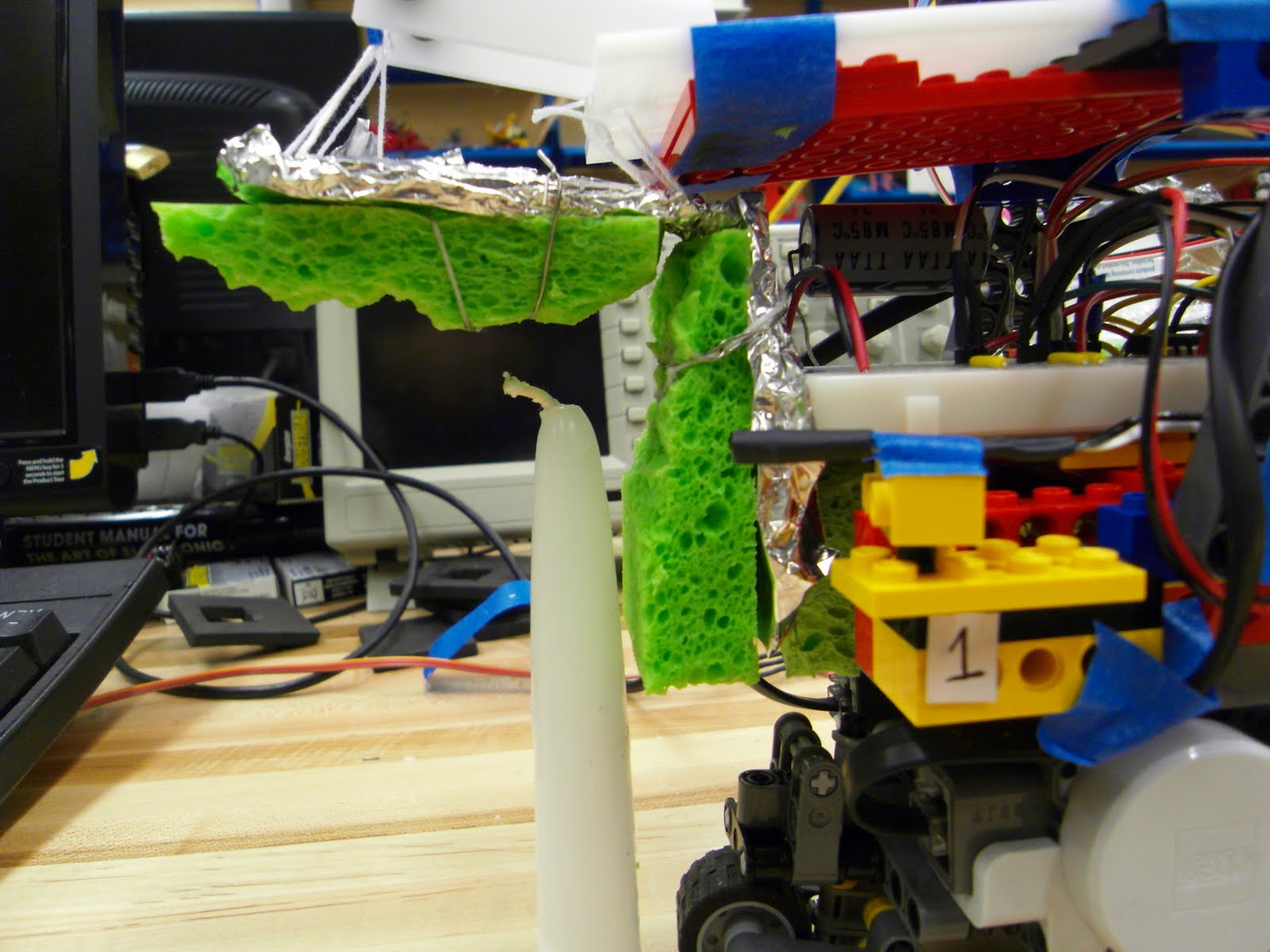
This was one of our first tries on our fire fighting robot. It was able to find and locate the candle to the position where it needs to be in order for the top shell to squiz it down. The only problem with it was that it did not really put out the fire. We came to a solution that adding some forward and backward movement when the top sea shell is over the candle would really put the light out.
[Fire Fighting Robot: Video - Finding the Candle]
After the first tryout, we decided to implement some codes so that the robot can move slightly forward and backward with the top shell over the candle, so that the light gets extinguished. In this video, we have added such methods. The robot finds the candle and moves towards it, but did not fully get to the candle. We checked on our sensor readings after and, for some reason, they have changed from what they used to be in front of a candle. Anyways, it was designed to repeat the hello method (the method that drops the top shell, moves slightly forward and backward [to put out the candle light completely] and then bring the top shell back up) with some forward movement each time until the light was out. We, however, had to stop the robot because the strings were almost on fire. But, we were happy that the robot found the candle and placed it right in the middle of the two sensors.
[Fire Fighting Robot: Video - Finding the Candle with More Precision]
We fixed the sensor values by a little bit to be more precise this time. The robot found the candle, almost perfectly stopped at the position where it was supposed to and executed the hello method to drop the top shell and put out the fire. However, the robot decided to behave weirdly even though we did not touch any other code. It would just move forward with full power all the sudden, when there wasn't code like that. Lia and I did not have any idea why, and we now are supposing that the offM method possibly is the problem because our last code to this tryout was offM method. It also was supposed to repeat the hello method if the light was still on. Hmm... weird... I wish I had known what the problem was.
[Fire Fighting Robot: Video - Finding & Putting Out the Candle]
After a few try outs, we found out that our car actually consistently finds the candle without trouble, moves towards it and positions itself so that the candle is in between. The only part that we thought we needed to work on was the ending, when the top shell drops and tries to extinguish the light. The candle lights were stronger than we expected. So here is a video of our robot extinguishing the candle light with slight forward, slight left, slight right and then slight backward movement to really put out the candle. And it works so well! We were so happy!!!
[Fire Righting Robot: Video - 10 ft Distance, Finding the Candle]
Right after we had success with the code above, we tried to show Lyn our new mechanism. However... we had the similar problem that we had before with the second video above. Our robot just had decided to act weird and just move forward. We did not change a single code after the video above. After then, our hello method stopped working appropriately and we no longer were able to control our servo motor, which was really sad... But we are happy with how far we have come with the project and the outcomes!
This was one of our first tries on our fire fighting robot. It was able to find and locate the candle to the position where it needs to be in order for the top shell to squiz it down. The only problem with it was that it did not really put out the fire. We came to a solution that adding some forward and backward movement when the top sea shell is over the candle would really put the light out.
[Fire Fighting Robot: Video - Finding the Candle]
After the first tryout, we decided to implement some codes so that the robot can move slightly forward and backward with the top shell over the candle, so that the light gets extinguished. In this video, we have added such methods. The robot finds the candle and moves towards it, but did not fully get to the candle. We checked on our sensor readings after and, for some reason, they have changed from what they used to be in front of a candle. Anyways, it was designed to repeat the hello method (the method that drops the top shell, moves slightly forward and backward [to put out the candle light completely] and then bring the top shell back up) with some forward movement each time until the light was out. We, however, had to stop the robot because the strings were almost on fire. But, we were happy that the robot found the candle and placed it right in the middle of the two sensors.
[Fire Fighting Robot: Video - Finding the Candle with More Precision]
We fixed the sensor values by a little bit to be more precise this time. The robot found the candle, almost perfectly stopped at the position where it was supposed to and executed the hello method to drop the top shell and put out the fire. However, the robot decided to behave weirdly even though we did not touch any other code. It would just move forward with full power all the sudden, when there wasn't code like that. Lia and I did not have any idea why, and we now are supposing that the offM method possibly is the problem because our last code to this tryout was offM method. It also was supposed to repeat the hello method if the light was still on. Hmm... weird... I wish I had known what the problem was.
[Fire Fighting Robot: Video - Finding & Putting Out the Candle]
After a few try outs, we found out that our car actually consistently finds the candle without trouble, moves towards it and positions itself so that the candle is in between. The only part that we thought we needed to work on was the ending, when the top shell drops and tries to extinguish the light. The candle lights were stronger than we expected. So here is a video of our robot extinguishing the candle light with slight forward, slight left, slight right and then slight backward movement to really put out the candle. And it works so well! We were so happy!!!
[Fire Righting Robot: Video - 10 ft Distance, Finding the Candle]
Right after we had success with the code above, we tried to show Lyn our new mechanism. However... we had the similar problem that we had before with the second video above. Our robot just had decided to act weird and just move forward. We did not change a single code after the video above. After then, our hello method stopped working appropriately and we no longer were able to control our servo motor, which was really sad... But we are happy with how far we have come with the project and the outcomes!