[Fire Fighting Robot: Design 1]



This model was our first design for our fire fighting robot. As we have decided to use wet sponge to put out the candle light, we attached some sponge onto the two shells using some strings and wires. We were concerned about the weight because we were anticipating the possibility of the strings breaking or the servo motor not being powerful enough to pull the shell up. However, thankfully, neither of our anticipation came to be true. The sponge, even though wet, was not that heavy, and our servo motor was powerful enough to sustain the weight of wet sponge. We made the surface of the sponge rough by cutting parts of it so that the sponge can really push down onto the candle light. We also covered parts of the shells by foil to make sure that nothing burns down. The ideal height of a candle was approximately 4 inches for our robot.
[Fire Fighting Robot: Design 2]

This is our second model for our model. After several try outs, we discovered that our robot would find the candle, but would miss it by 1/5 of an inch, which is a huge distance for our mechanism. The robot really had to be right in front of the candle because putting a candle out with sponge, unlike many would think, was not so easy. Even after our robot pushed out on the candle, the light would not extinguish completely and revive again. So, our thought was that if we have a wider sponge area for the robot, then even if it missed the candle by a little bit, it wouldn't matter because the sponge is now wider. However, attaching some more pieces to the sides of the center sponge was not a good idea because it kept on falling. It also continuously covered the sensors' light reading, which caused a huge problem in our mechanism.
[Fire Fighting Robot: Design 3]



Besides the unsuccessful result from the fire fighting robot design 2, the robot got itself on fire during one of the tryouts. As a result, the 4 strings holding the top shell piece were all burnt down and everything was a mess. However, after a few hours of repairing, we were able to restore all the ruined parts. To not get it on fire EVER again, we decided to cover every parts exposed to the dangers of fire with aluminum foil.
After we threw away the idea of widening our sponge pieces, we needed to come up with a better scheme to put out the candle light reliably. We decided to polish on our code and make the robot move slightly forward, slightly left, slightly right and then slightly back, during which the top shell will stay down. This is better explained in the video section with some cool video clips :) Anyways, our Design 3 model is the final design that we decided to stick with.


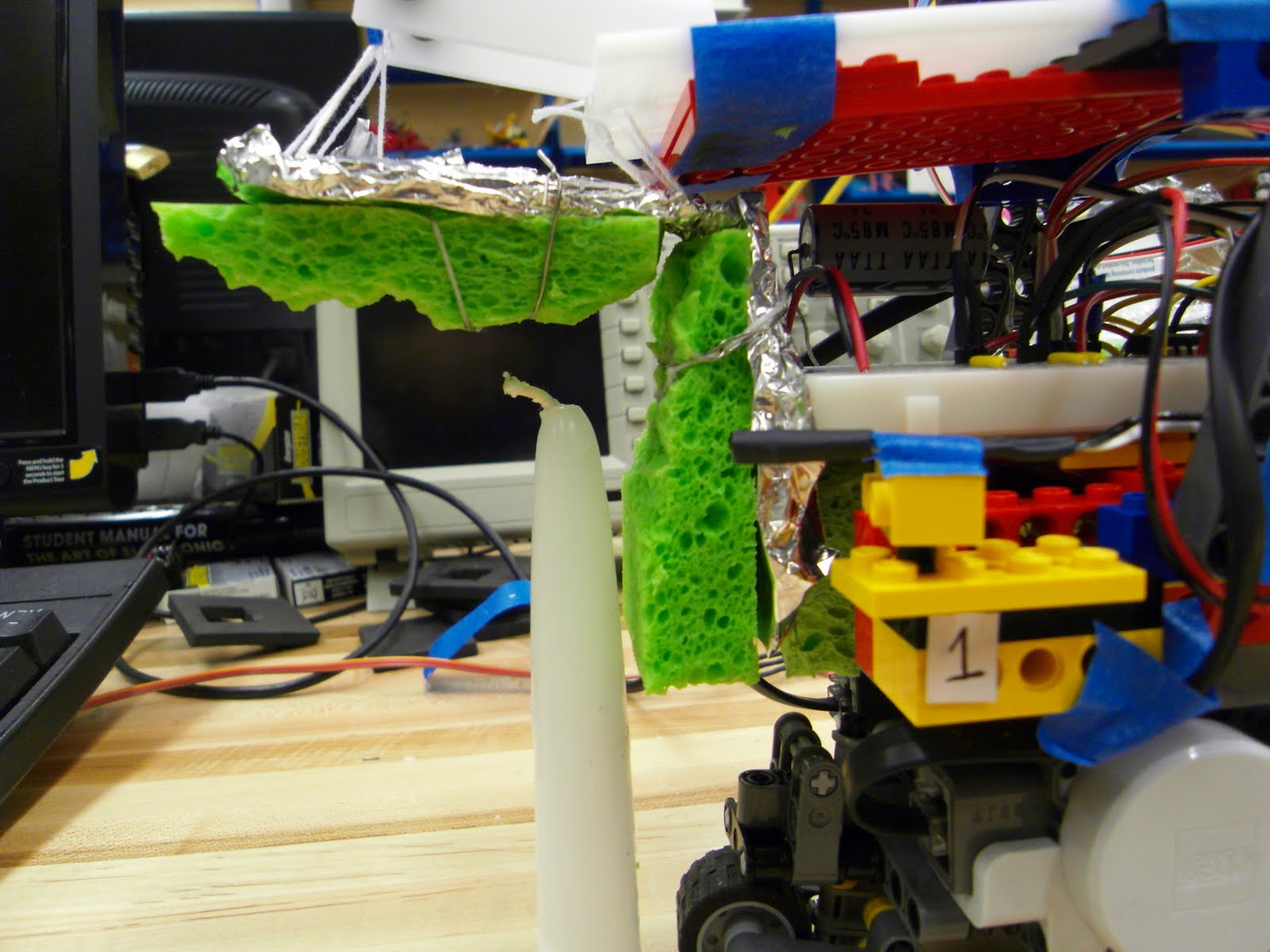
This model was our first design for our fire fighting robot. As we have decided to use wet sponge to put out the candle light, we attached some sponge onto the two shells using some strings and wires. We were concerned about the weight because we were anticipating the possibility of the strings breaking or the servo motor not being powerful enough to pull the shell up. However, thankfully, neither of our anticipation came to be true. The sponge, even though wet, was not that heavy, and our servo motor was powerful enough to sustain the weight of wet sponge. We made the surface of the sponge rough by cutting parts of it so that the sponge can really push down onto the candle light. We also covered parts of the shells by foil to make sure that nothing burns down. The ideal height of a candle was approximately 4 inches for our robot.
[Fire Fighting Robot: Design 2]

This is our second model for our model. After several try outs, we discovered that our robot would find the candle, but would miss it by 1/5 of an inch, which is a huge distance for our mechanism. The robot really had to be right in front of the candle because putting a candle out with sponge, unlike many would think, was not so easy. Even after our robot pushed out on the candle, the light would not extinguish completely and revive again. So, our thought was that if we have a wider sponge area for the robot, then even if it missed the candle by a little bit, it wouldn't matter because the sponge is now wider. However, attaching some more pieces to the sides of the center sponge was not a good idea because it kept on falling. It also continuously covered the sensors' light reading, which caused a huge problem in our mechanism.
[Fire Fighting Robot: Design 3]



Besides the unsuccessful result from the fire fighting robot design 2, the robot got itself on fire during one of the tryouts. As a result, the 4 strings holding the top shell piece were all burnt down and everything was a mess. However, after a few hours of repairing, we were able to restore all the ruined parts. To not get it on fire EVER again, we decided to cover every parts exposed to the dangers of fire with aluminum foil.
After we threw away the idea of widening our sponge pieces, we needed to come up with a better scheme to put out the candle light reliably. We decided to polish on our code and make the robot move slightly forward, slightly left, slightly right and then slightly back, during which the top shell will stay down. This is better explained in the video section with some cool video clips :) Anyways, our Design 3 model is the final design that we decided to stick with.
No comments:
Post a Comment